
Temas a revisar:
Aplicaciones
Ventajas y Precauciones en su uso
Modelos y Marcas Comunes
Comparación de marcas comerciales
Definición Principal
Que es un sensor de visión
Los sensores de visión utilizan imágenes capturadas por una cámara para determinar funciones básicas como la presencia, orientación y precisión de las piezas. De hecho, los sensores de visión pueden hacer la labor de múltiples sensores fotoeléctricos, los sensores de visión proporcionan resultados de paso/fallo.
El sensor de visión incluye la funcionalidad para su fácil puesta en marcha, acostumbra a tener un tamaño muy reducido y tiene menor potencia de cálculo y menor coste.
Este tipo de sensores están orientados al mercado de cliente final, y se supone que el propio cliente puede instalarlo, sin ayuda de ninguna ingeniería y sin necesidad de una puesta a punto por parte de terceros. Los sensores de visión están pensados para resolver problemas concretos y fáciles, y para ser manejados de forma muy sencilla, incluso por personal no especializado en visión. Para que sean más fáciles de manejar, se les han eliminado muchas funciones que incorporan los sistemas de visión más avanzados, reduciendo de esta manera su complejidad.
Principio y tipos principales
Dentro los tipos principales existen monocromáticos y/o color
- Modelo Monocromático
La imagen capturada por el cabezal (cámara) pasa a través del lente, para ser convertida en una señal eléctrica por el elemento receptor de luz (un CMOS en la mayoría de los casos). A continuación, el brillo y la forma del objeto se determinan de acuerdo a la información de claridad/oscuridad e intensidad de cada píxel del elemento receptor de luz.

- Modelo Color
El elemento receptor de luz es de tipo color. A diferencia del de tipo blanco y negro, que identifica un rango de intensidades entre los extremos blanco y negro, la información de la luz recibida se separa en tres colores (RGB). Luego, se identifica el rango de intensidad de cada uno de estos colores, lo que hace posible distinguir entre objetos, incluso cuando sus colores presentan diferencias de intensidad mínimas.

Aplicaciones básicas de uso
Entre las aplicaciones que se pueden encontrar son: Localización, Inspección, Medición y Conteo
Inspección
- Detección por conteo de pixeles
En este tipo de aplicaciones como su nombre lo indica se usa para realizar detecciones de algunos componentes, piezas, etiquetas, etc. Por el cambio de tonalidad cuando tenemos monocromático se busca el negro contra blanco y cuando tenemos color se busca por lo general el RGB.

Este tipo de aplicaciones se consideran de presencia ausencia, donde solo se busca algún cambio de pixel.
Tener cuidado que si se va usar este detección los cambios entre bueno y malo halla una diferencia aceptable en el conteo de pixeles, es decir no querer usarlo con un fondo negro y detectar un fondo no muy negro, eso no suele funcionar bien.
Tener cuidado que si se va usar este detección los cambios entre bueno y malo halla una diferencia aceptable en el conteo de pixeles, es decir no querer usarlo con un fondo negro y detectar un fondo no muy negro, eso no suele funcionar bien.
- Detección de patrones(Con diferentes modelos)
En este tipo de aplicaciones son en las cuales se busca detectar siempre que el producto traiga algo como una leyenda, un color, un componente, etc. Pero siempre debe ser el mismo, es decir que si es un texto no cambien las letras y ya dependerá de la aplicación si siempre es en el misma posición o puede cambiar la posición ya que la mayoría de los sensores pueden hacer la detección de la misma forma en diferentes posiciones.


Este tipo de aplicaciones es para comparar cuando se tiene mas de un modelo el mismo producto y solo se tiene algunos cambios, los mencionados arriba.
Para estas aplicaciones se pueden usar, pero hay que tener cuidado ya que entre bueno y malo suele el porcentaje al parecido y si entre un modelo y otro las diferencias son pocas podemos tener problemas de que el sistema sea estable en largos periodos de trabajo.
Para estas aplicaciones se pueden usar, pero hay que tener cuidado ya que entre bueno y malo suele el porcentaje al parecido y si entre un modelo y otro las diferencias son pocas podemos tener problemas de que el sistema sea estable en largos periodos de trabajo.
- Detección por detección de borde
En las detecciones por borde son cuando se busca un cambio de contraste puede ser de blanco a negro o viceversa y por lo general se hace en los bodes de la pieza o en donde se ven mas notables estos cambios debido a la iluminación.

Este tipo de aplicaciones es hay que tener cuidado con la iluminación y las sombras que se puedan generar ya que como se busca un cambio de claro a oscuro o viceversa y cuando se tienen sombras o brillos que pueden generar falsas detecciones.
Medición

Localización
Medición
- Medición Distancia, Angulo y diámetro
Los equipos que tienen estas funciones suelen ser los de gama alta entre los sensores de visión y por consecuente son mas costosos ya que las aplicaciones son mas especificas. En estas aplicación lo que se busca es realizar una medición entre dos puntos cuando es por distancia, los dos puntos deben ser referentes como dos bordes donde se vea el cambio marcado, el resultado suele ser en pixeles y para tener el valor real siempre se tiene que calibrar el sensor con los famosos tablero de ajedrez.

- Localización por patrón
La locación por patrón se puede utilizar para detectar alguna característica especifica en el pieza, pero cuando esta no repite su posición 100% igual, entonces con esto podemos darle un rango donde el sensor puede buscar el patrón que se le programo, al igual en casi todos sensores de visión esta función se suele usar para enlazar las demás detecciones y cuando el patrón se mueva un poco las herramientas lo hagan hacia la misma posición para así poder detectar lo que es importante, siempre y cuando no importe si el objeto se mueve.
Cuando se busca detectar una característica en particular como presencia/ausencia o alguna marca y esta siempre debe estar en el mismo lugar es lógico no usar la localización por patrón y que todas las herramientas se muevan.
En el ejemplo se busca la posición de las letras y en base a esto se mueve la herramienta que busca el cambio de contraste

Puesta en marcha general
- Iluminación
Para la puesta en marca siempre hay que considera que la iluminación es una base suma mente importante en las detección, suele ser mas de un 60% del éxito de la aplicación, por lo cual antes de comenzar a colocar herramientas y comenzar a programar, se debe configuración las iluminaciones, brillos y todas las opciones que tenga el sensor de visión, hasta que se tenga una buena imagen donde se vea posible detectar las características que se requieren.
Siempre es bueno poder tomarse un tiempo para estar haciendo solo tomas del objeto y poder analizar que tantos cambios existen en cuestión a la imagen o si es que nuestra imagen ya esta estable.
La mayoría de los sensores de visión ya cuentan con leds para controlar la iluminación, pero si es necesario se puede agregar o quitar de acuerdo a lo que se requiera.
Para mejorar las imágenes cuando los ambientes no son lo óptimos por tema de iluminación, etc. Siempre se podrá utilizar filtros, cubiertas anti reflejos, otro color de iluminación, la idea es tener la mejor imagen posible.

- Configuración de herramientas
-Si la aplicación va a llevar detección por patrón o no para contemplar el movimiento -Seleccionar la herramienta – colocarla en la zona a detectar – ajustar la dimensión del recuadro – ajustar los limites de aceptación (En alunas herramientas puede haber opciones diferentes)
En rangos generales así es como se configuraría una herramienta, dependiendo el equipo pero casi todos se pueden usar mas de una herramienta por toma, solo que cada que se agrega una herramienta se agrega tiempo de respuesta, esto solo para aplicaciones rápidas hay que tenerlo en cuenta.

Validación de la configuración en el sensor de visión
Una vez que se termina la configuración o programación del equipo es importante probar que lo que se configuro y los limites funcionan bien y no se tienen falsas detecciones. Esto realmente se hace probando y probando para ver que siempre sea estable.
Pero lo que hay que entender que uno se puede pasar el día entero probando y probando y siempre salir detecciones correctas pero cuando ya el cliente o el usuario prueba comienza a fallar y des ahí hay que desarrollar un método de prueba que con unas pocas pruebas identificar si va a funcionar o no.
La cantidad de pruebas dependerá con el material que contemos si tenemos la cantidad de piezas ilimitadas o solo una pieza, pues solo hay que hacer lo siguiente:
1. Pensar que nosotros conocemos como colocar el producto para que sea OK la aplicación o que sea NOK
La prueba es intentar colocar la pieza pensando en como la puede intentar poner alguien o si es automática la maquina como pudiera llegar a venir en la maquina. Probar de las formas que se nos venga a la mente.
2. Cuando solo tenemos piezas que están correctas, intentar tener fallos
Cuando se tienen solo piezas correctas, hay que intentar hacer que la pieza tengas fallas detectables y retar a nuestra configuración, no se tenga miedo de hacerlo fallar con todo lo que se ocurra. Incluso cuando hacemos esto podemos hacer fallas que posiblemente nunca vengan así pero si el sistema lo logra detectar te darás cuenta que la aplicación va bien.
3. Siempre que puedas pide a alguien que haga la prueba
Cuando en la aplicación se carga la pieza manual o semi-automática, es bueno pedir ayuda a alguien que no conoce el sistema a que realice las pruebas ya que el o ella por desconocimiento puede encontrar puntos ciegos que nosotros por conocer la aplicación no vemos y podemos solucionar y mejor.
Cuando usar y Cuando no usar
Aquí presento alguna de las ventajas y precauciones en el uso de estos sistemas:

Comparación de marcas comerciales
Comparación de algunos modelos usados comúnmente en la industria, cabe resaltar que existen diferentes marcas que no serán mencionadas, solo me referiré a las que he visto mas en la industria y con las que he trabajado y seleccionado para aplicaciones.
Para su selección los primeros datos que debemos tener siempre son:
- Distancia mínima y en casos máxima de instalación o detección
- Campo de detección Ancho x largo
Ya que esto se comenzaran a descartar todos los equipos que no cumplan estas primeros requerimientos y seguir enfocándonos a las pruebas de detección.
Cabe mencionar que hay marcas que tienen a la venta sensores de visión que cuentan solo con una o dos herramientas, es decir no incluye todas como otras marcas, esto lo suelen hacer para ser mas baratos y que el comprador se deje guiar por esto, por eso es muy importante revisar que si con estas dos o una herramienta la aplicación se resuelve al 100% se puede ahorrar en costos pero donde se requiera alguna mas o se añada otro modelo en el futuro el gasto será el doble.

Comparación de algunos modelos usados comúnmente en la industria, cabe resaltar que existen diferentes marcas que no serán mencionadas, solo me referiré a las que he visto mas en la industria y con las que he trabajado y seleccionado para aplicaciones.
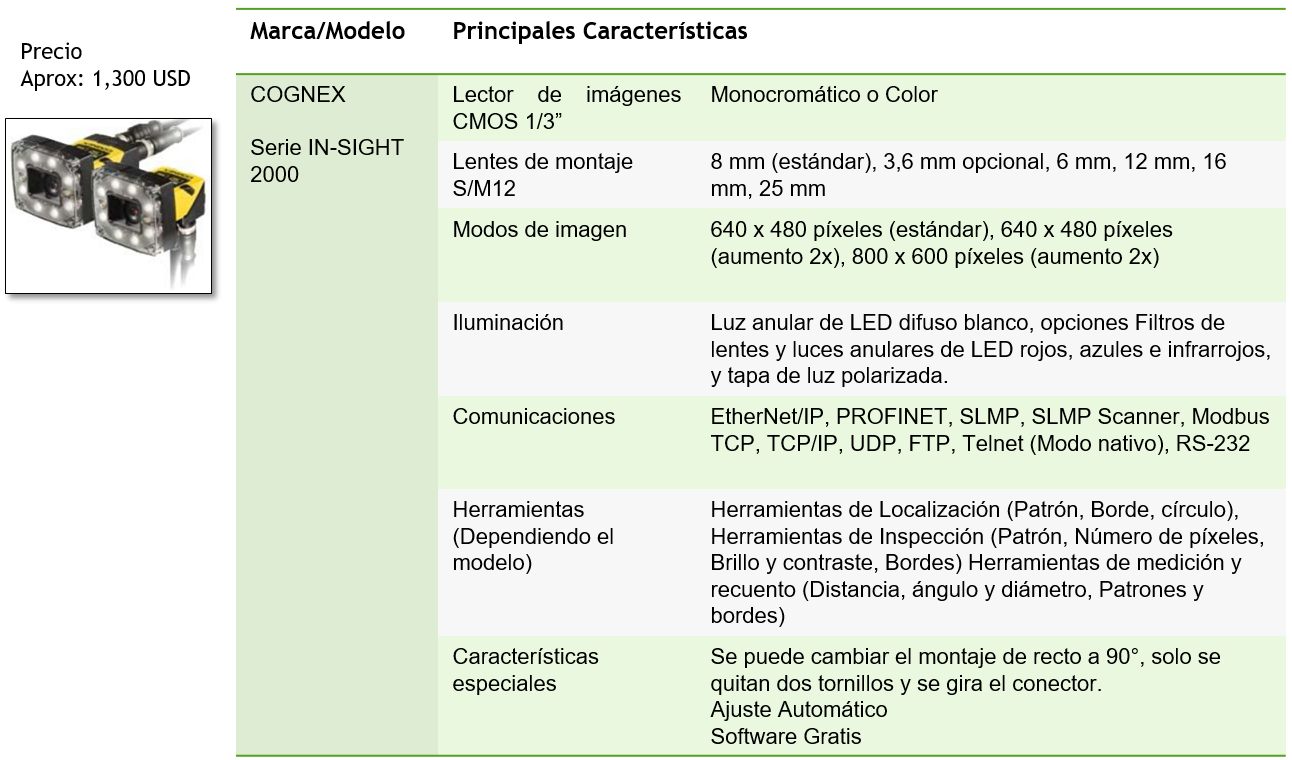

Este modelo suele ser adecuado cuando se tiene poco espacio para colocar el sensor pero cuando la distancia a detectar no es mucha máximo 600mm de distancia y campo de visión 412mm x 500mm campo amplio.

Uso para alcances de detección largas, campos de visión no tan amplios.

Resumen
No hay comentarios.:
Publicar un comentario